
Nachricht
 Heim / Nachricht / Branchennachrichten / Was ist der Aufbau, die Komponenten und das Funktionsprinzip eines Horizontalschwenkantriebs?
Heim / Nachricht / Branchennachrichten / Was ist der Aufbau, die Komponenten und das Funktionsprinzip eines Horizontalschwenkantriebs? Was ist der Aufbau, die Komponenten und das Funktionsprinzip eines Horizontalschwenkantriebs?
 2026.04.27
2026.04.27
 Branchennachrichten
Branchennachrichten
Hoderizontal-Schwenkantriebe sind Präzisionsdrehantriebsbaugruppen, die ein Drehkranzlager, eine Schneckengetriebe-Untersetzungsstufe und ein Antriebsgehäuse in einer einzigen integrierten Einheit kombinieren, die Lasten in der horizontalen Ebene tragen, drehen und halten kann. Im Gegensatz zu herkömmlichen Drehgetrieben, die das Drehmoment entlang einer festen Achse übertragen, bewältigen Schwenkantriebe gleichzeitige Radiallasten, Axiallasten und Kippmomente und liefern gleichzeitig eine kontrollierte Rotation – was sie zur bevorzugten Antriebslösung für Anwendungen wie Solartracker, Baukräne, Hubarbeitsbühnen, Industrieroboter, Satellitenantennen und Hochleistungsdrehtische macht. Für Ingenieure, die Antriebssysteme spezifizieren, für Wartungspersonal, das installierte Geräte wartet, und für Beschaffungsteams, die Lieferantenoptionen bewerten, ist es wichtig zu verstehen, wie horizontale Schwenkantriebe aufgebaut sind und wie sie auf mechanischer Ebene funktionieren.
Gesamtaufbau eines Horizontalschwenkantriebs
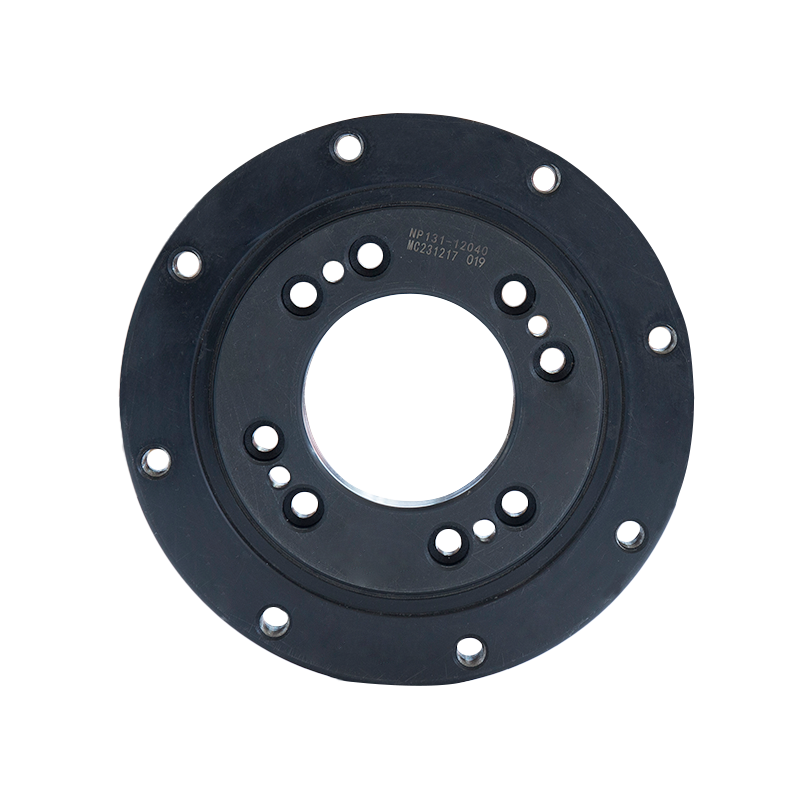
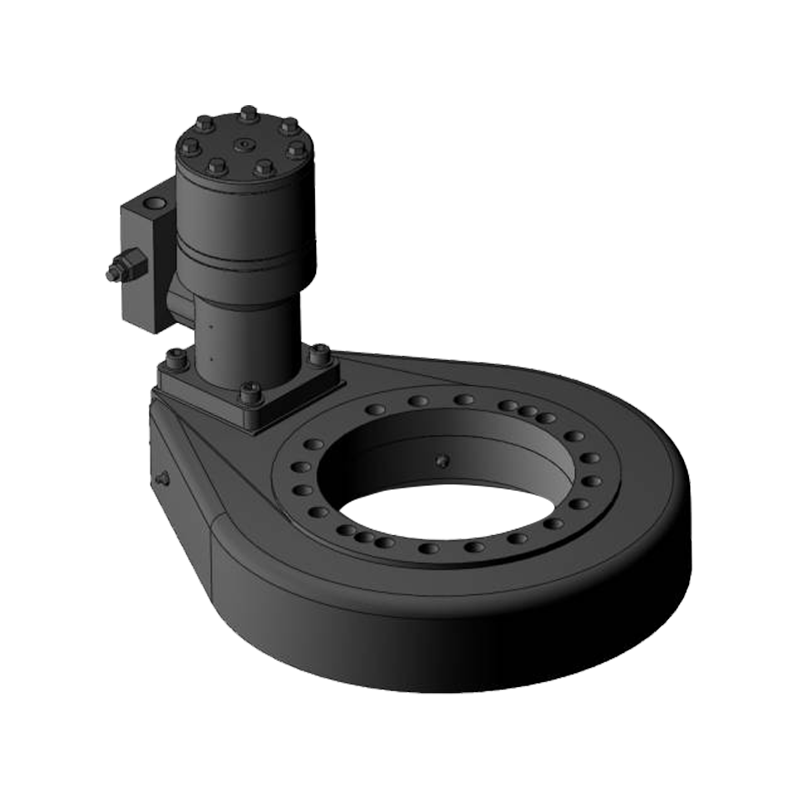
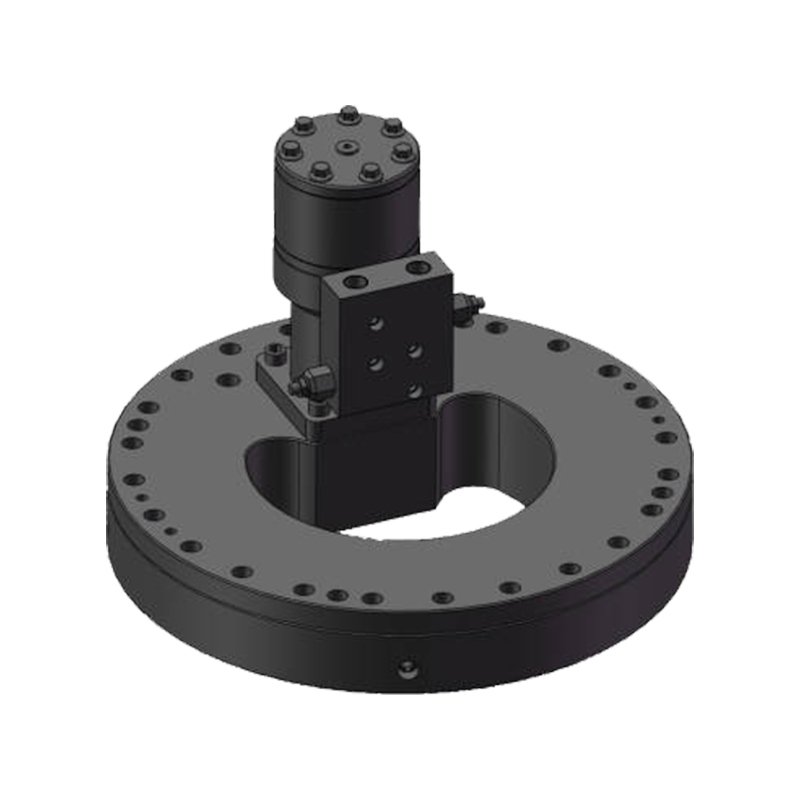
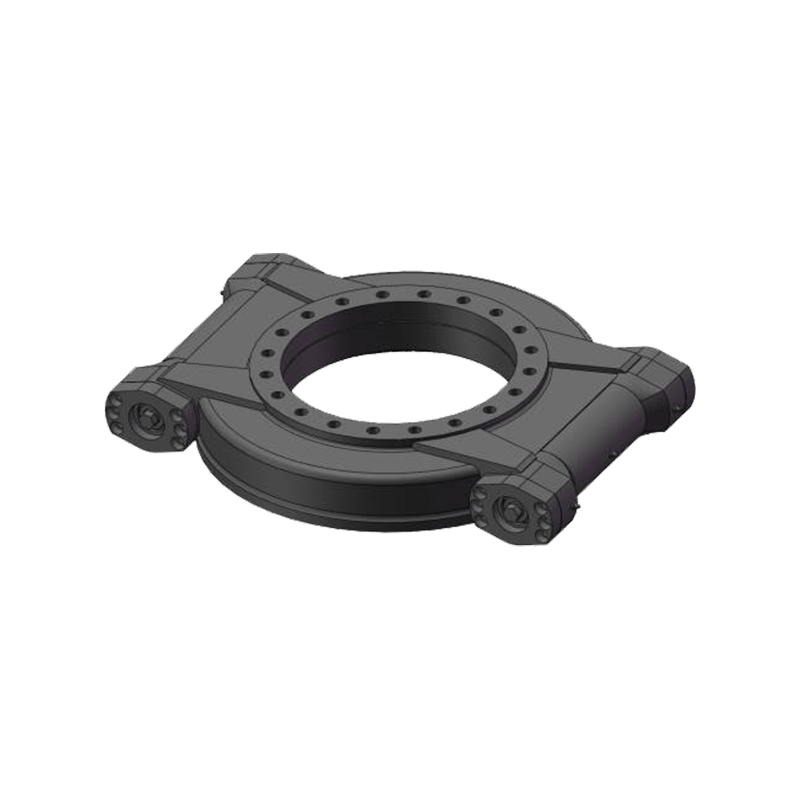
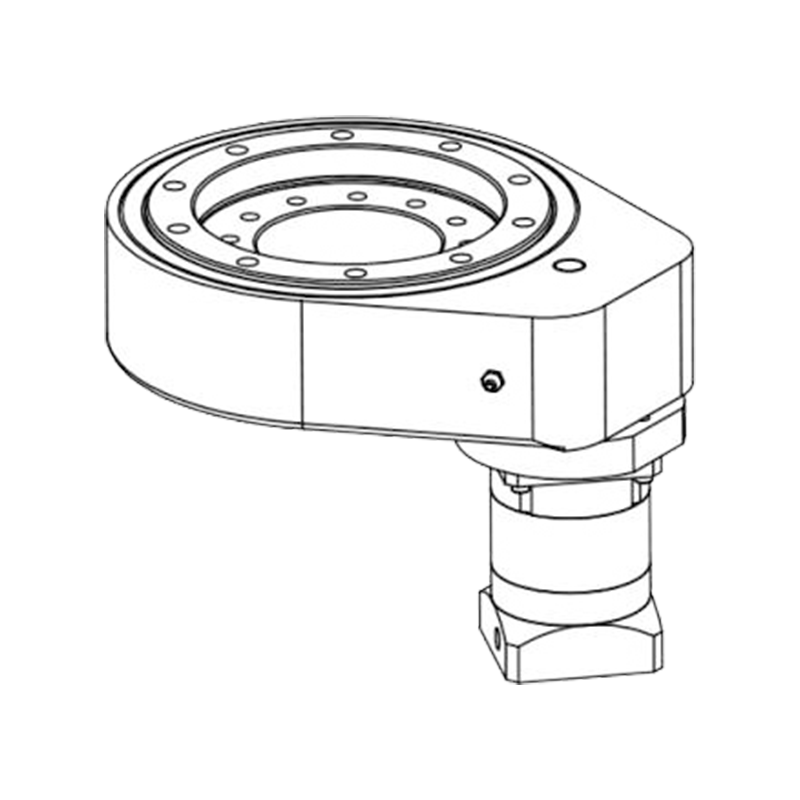
Ein horizontaler Schwenkantrieb ist eine eigenständige Baugruppe, die die Funktionen Lagerunterstützung, Untersetzungsgetriebe und Drehantrieb in einem einzigen kompakten Gehäuse vereint. In der horizontalen Konfiguration ist die Achse des Hauptdrehkranzes vertikal ausgerichtet – das heißt, der rotierende Ausgabetisch oder -flansch dreht sich um eine vertikale Achse in einer horizontalen Ebene. Dies ist die natürliche Ausrichtung für Drehtische, Solarazimuth-Tracker und Kranschwenksysteme, bei denen sich die Nutzlast horizontal um einen vertikalen Mittelpunkt dreht.
Das Außengehäuse des Schwenkantriebs ist aus Gusseisen oder Sphäroguss gefertigt und dient sowohl als Strukturschale des Getriebes als auch als Montageschnittstelle zur stationären Grundstruktur. Das Gehäuse bietet Steifigkeit, um den erheblichen Biegemomenten standzuhalten, die entstehen, wenn außermittige Lasten auf den rotierenden Abtrieb wirken, und umschließt den Zahneingriff in einer abgedichteten, geschmierten Umgebung. Befestigungslöcher auf der Gehäuseoberfläche und -basis ermöglichen eine Schraubverbindung mit dem Maschinenrahmen mit standardisierten Lochkreisdurchmessern, und der Abtriebsflansch oder -ring stellt die Schraubschnittstelle zur darüber liegenden rotierenden Last dar.
Die Gesamtfläche der Baugruppe ist im Verhältnis zu den Lasten, die sie bewältigen kann, kompakt. Ein Mittelklasse-Horizontalschwenkantrieb mit einer Größe von ca 300 mm Durchmesser kann in der Regel axiale Lasten über 50 kN, radiale Lasten über 30 kN und Kippmomente über 15 kN·m aufnehmen und liefert dabei Ausgangsdrehmomente im Bereich von 5.000 bis 20.000 N·m, abhängig von der Motoreingangs- und Übersetzungsauswahl. Diese Leistungsdichte im Verhältnis zur Gehäusegröße ist einer der wichtigsten technischen Vorteile, die die Einführung des integrierten Schwenkantriebsformats gegenüber separat montierten Lager- und Getriebelösungen vorantreiben.
Kernkomponenten und ihre Funktionen
Jeder horizontale Drehantrieb basiert auf einer Reihe mechanischer Kernkomponenten, die zusammenarbeiten, um die Eingangsdrehung eines Motors in eine kontrollierte, drehmomentstarke Ausgangsdrehung des Drehkranzes zu übertragen. Jede Komponente erfüllt im Lastpfad eine bestimmte und unersetzliche Funktion.
Drehkranzlager
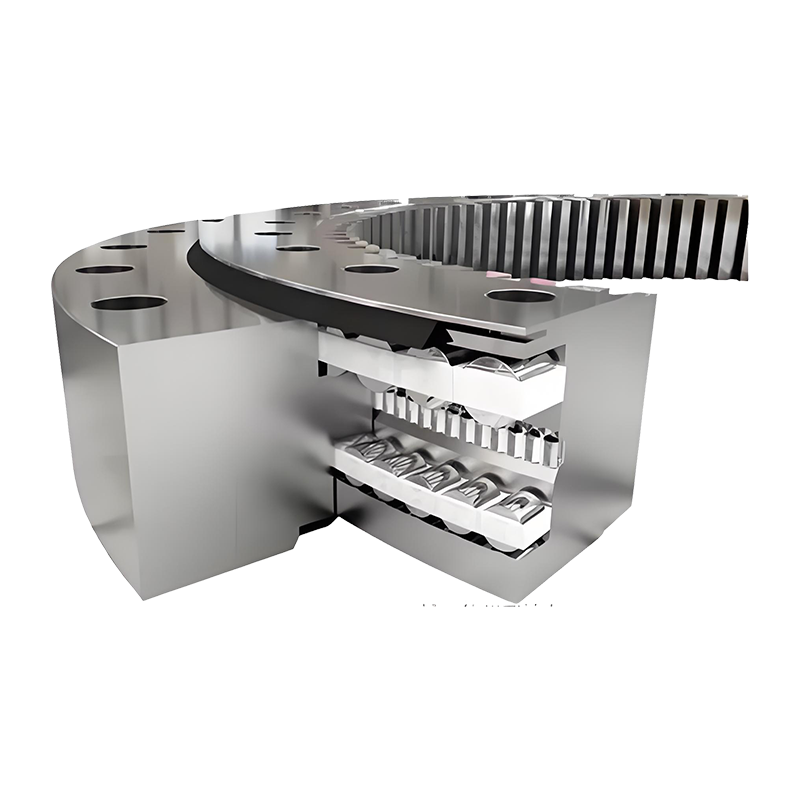
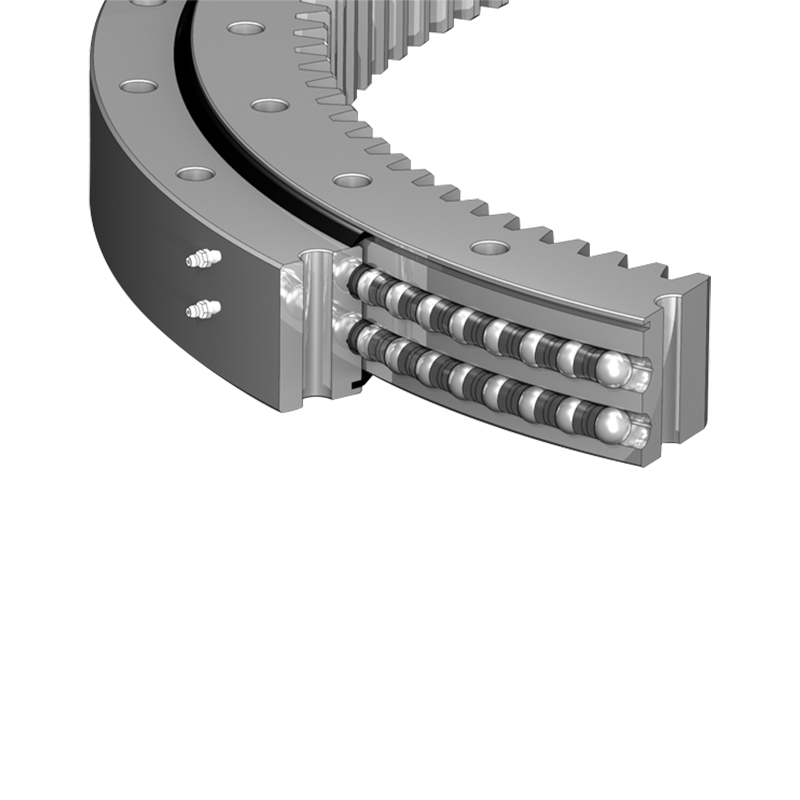
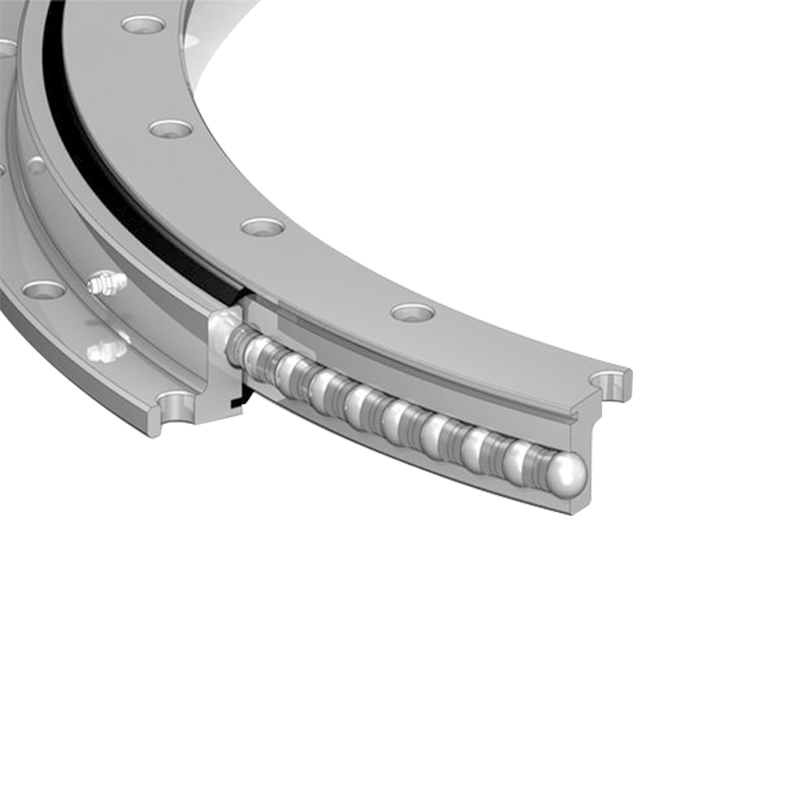
Der Drehkranz ist das zentrale Strukturbauteil der Baugruppe. Es handelt sich um ein Wälzlager mit großem Durchmesser und einem integrierten Zahnrad – typischerweise einem Schneckenrad-Hohlrad –, das entweder in den Innen- oder Außenring eingearbeitet ist. Bei horizontalen Drehwerksantrieben wird das Zahnrad je nach Ausführung meist in die Innenfläche des Außenrings oder die Außenfläche des Innenrings eingearbeitet. Die Wälzkörper zwischen den Innen- und Außenringen tragen alle aufgebrachten Lasten – Axialkraft durch das Gewicht der Nutzlast, Radialkraft durch horizontale Belastung und Kippmoment durch exzentrische Lasten – und ermöglichen gleichzeitig eine Drehung der Ringe relativ zueinander mit minimaler Reibung.
Am häufigsten werden Drehkränze in Horizontalantrieben verwendet einreihige Vierpunkt-Kugellager or Kreuzrollenlager . Kugellager mit Vierpunktkontakt verwenden ein Laufbahnprofil mit gotischem Bogen, das es jeder Kugel ermöglicht, an vier Punkten gleichzeitig Kontakt mit der Laufbahn herzustellen, sodass eine einzelne Kugelreihe axiale Lasten aus beiden Richtungen, radiale Lasten und Kippmomente aufnehmen kann. Kreuzrollenlager wechseln sich in einer einzigen Reihe mit Zylinderrollen im 90-Grad-Winkel ab und erreichen so eine sehr hohe Steifigkeit und Momentenkapazität bei dünnem Querschnitt. Beide Typen werden in horizontalen Schwenkantrieben verwendet, wobei gekreuzte Rollenkonstruktionen bevorzugt werden, wenn maximale Steifigkeit und Genauigkeit erforderlich sind, und Vierpunkt-Kontaktkugelkonstruktionen aus Kostengründen bei schwereren, aber weniger präzisen Anwendungen bevorzugt werden.
Schneckenradsatz
Die Schneckengetriebe-Untersetzungsstufe ist der Mechanismus, durch den das Motordrehmoment vervielfacht und die Eingangsdrehzahl auf die für die Anwendung erforderliche Ausgangsdrehung mit niedriger Drehzahl und hohem Drehmoment reduziert wird. Die Schneckenwelle – eine Welle mit schrägem Gewinde, die direkt vom Eingangsmotor angetrieben wird – kämmt mit den Zahnkränzen des Drehkranzes, der als Schneckenrad im Zahnradpaar fungiert. Wenn sich die Schneckenwelle dreht, erzeugt der Schrägungswinkel des Schneckengewindes eine Tangentialkraft auf die Zahnkranzzähne und drückt diese und den Drehkranz um die Drehachse.
Schneckenübersetzungsverhältnisse in Drehwerksantrieben liegen typischerweise im Bereich von 20:1 bis 100:1 oder höher innerhalb einer einzigen Untersetzungsstufe, was eine erhebliche Drehmomentvervielfachung aus kompakten Eingangsmotorpaketen ermöglicht. Die Schneckenwelle wird typischerweise aus einsatzgehärtetem legiertem Stahl mit einem geschliffenen Gewindeprofil hergestellt, um einen präzisen Zahnkontakt zu erreichen und das Spiel zu minimieren. Die Hohlradzähne werden üblicherweise aus durchgehärtetem Stahl mit mittlerem Kohlenstoffgehalt oder, bei Premiumausführungen, aus einer Bronzelegierung geschnitten, was für günstige Reibungseigenschaften gegenüber der Stahlschnecke sorgt und den Verschleiß beider Komponenten reduziert.
Schneckenwellenlager und Gehäuse
Die Schneckenwelle wird an beiden Enden im Gehäuse durch Wälzlager – typischerweise Kegelrollenlager oder Schrägkugellager – getragen, die die durch den Eingriff zwischen Schnecke und Ring erzeugten Radiallasten und die durch den Schrägungswinkel des Schneckengewindes erzeugten axialen Schubkräfte aufnehmen. Die richtige Vorspannung dieser Wellenlager ist entscheidend für die Aufrechterhaltung eines gleichmäßigen Eingriffskontakts zwischen Schnecke und Zahnkranz über den gesamten Lastbereich des Antriebs. Eine unzureichende Vorspannung führt dazu, dass sich die Schneckenwelle unter Last durchbiegt, wodurch das Spiel zunimmt und der Zahnverschleiß beschleunigt wird. Eine übermäßige Vorspannung erhöht die Lagerreibung und die Wärmeentwicklung, wodurch die mechanische Effizienz verringert und die Lagerlebensdauer verkürzt wird.
Dichtungssystem
Eine wirksame Abdichtung ist für die Lebensdauer des Schwenkantriebs von entscheidender Bedeutung, insbesondere bei Außenanwendungen wie Solartrackern und Mobilkränen, bei denen die Baugruppe Regen, Staub, Temperaturschwankungen und UV-Strahlung ausgesetzt ist. Horizontale Schwenkantriebe verwenden eine Kombination aus Labyrinthdichtungen, Lippendichtungen und O-Ring-Gleitringdichtungen an der Schnittstelle zwischen dem rotierenden Ring und dem stationären Gehäuse sowie an den Eintrittspunkten der Schneckenwelle in das Gehäuse. Der Wälzkörperhohlraum des Drehkranzes wird typischerweise durch Gummidichtungen abgedichtet, die mit den Lagerringen verbunden sind, wodurch Schmiermittelverlust und das Eindringen von Verunreinigungen an der Primärlagerschnittstelle verhindert werden.
Funktionsprinzip: Wie Rotation und Drehmoment erzeugt werden
Der Betriebsablauf eines Horizontalschwenkantriebs beginnt am Motor – entweder ein Elektromotor mit Planetengetriebe-Eingangsstufe, ein Hydraulikmotor oder in einigen Ausführungen ein Servomotor mit Direktantrieb – der am Schneckenwellen-Eingangsflansch des Gehäuses montiert ist. Wenn sich die Motorwelle dreht, dreht sie die Schneckenwelle mit Eingangsgeschwindigkeit. Das Spiralgewinde der Schneckenwelle steht in ständigem Eingriff mit den Hohlradzähnen des Innen- oder Außenrings der Drehverbindung.
Die Geometrie des Schnecken-Ring-Zahnradeingriffs wandelt die schnelle Drehbewegung der Schneckenwelle in die langsame, drehmomentstarke Drehung des Drehkranzes um, und zwar durch einen mechanischen Vorteil, der durch das Übersetzungsverhältnis bestimmt wird. Wenn die Schneckenwelle eine volle Umdrehung vollendet, bewegt sich der Drehkranz um eine Anzahl von Hohlradzähnen weiter, die der Anzahl der Gewindegänge auf der Schnecke entspricht. Eine eingängige Schnecke, die einen Zahnkranz mit 60 Zähnen antreibt, erzeugt ein Übersetzungsverhältnis 60:1 — Eine volle Schneckenumdrehung bewegt den Zahnkranz um genau eine Zahnteilung, und 60 Schneckenumdrehungen vollenden eine volle Umdrehung des Drehkranzes.
Die vom Schneckengewinde auf die Hohlradzähne ausgeübte Tangentialkraft ist das Produkt aus dem Eingangsdrehmoment multipliziert mit dem Übersetzungsverhältnis und der mechanischen Effizienz des Schneckeneingriffs. Schneckengetriebe sind mechanisch weniger effizient als parallelachsige Schrägverzahnungen, da zwischen Schnecke und Radzähnen ein Gleitkontakt besteht und nicht der Rollkontakt von Schrägverzahnungspaaren. Wirkungsgradwerte für schneckengetriebene Drehwerksantriebe liegen typischerweise im Bereich 50 % bis 80 % Bereich , abhängig vom Steigungswinkel der Schnecke, dem Schmierzustand und den verwendeten Materialien. Höhere Steigungswinkel (mehrgängige Schnecken) verbessern den Wirkungsgrad, verringern jedoch das Übersetzungsverhältnis pro Stufe; Kleinere Steigungswinkel verbessern das Übersetzungsverhältnis, verringern jedoch den Wirkungsgrad und erhöhen die Wärmeentwicklung bei hohen Eingangsdrehzahlen.
Selbsthemmendes Verhalten
Eines der wichtigsten Funktionsmerkmale des schneckengetriebenen Horizontalschwenkantriebs ist seine inhärente Selbsthemmungsfähigkeit. Wenn der Schneckensteigungswinkel unter einem Schwellenwert liegt – normalerweise unter ungefähr 6 bis 8 Grad , obwohl die genauen Werte von den Reibungskoeffizienten abhängen – die Zahneingriffsgeometrie verhindert, dass das Hohlrad die Schneckenwelle zurücktreibt. Dies bedeutet, dass der Schwenkantrieb bei Wegnahme der Motorleistung seine Position unter Last behält, ohne dass ein separates Bremssystem erforderlich ist. Die Reaktionskraft der Belastung auf die Hohlradzähne erzeugt eine Kraftkomponente entlang der Schneckenwellenachse, aber die Reibung im Schnecken-Rad-Kontakt verhindert, dass diese Kraft die Haftreibung überwindet und die Schnecke in Drehung versetzt.
Die Selbsthemmung ist ein entscheidendes Sicherheitsmerkmal in Anwendungen wie Solartrackern, Hubarbeitsbühnen und Materialtransportgeräten, bei denen der Antrieb bei Stromunterbrechungen oder Ausfällen des Steuerungssystems unter aufgebrachten Lasten eine feste Position beibehalten muss. Es macht in vielen Anwendungen den Bedarf an externen Haltebremsen überflüssig, was das Systemdesign vereinfacht und die Anzahl der Komponenten reduziert. Selbsthemmende Schwenkantriebe können jedoch nicht zur manuellen Notpositionierung zurückgefahren werden, was bei der Maschinensicherheitsplanung berücksichtigt werden muss.

Tragfähigkeitsparameter und Auswahlspezifikationen
Die Auswahl des richtigen Horizontaldrehantriebs für eine bestimmte Anwendung erfordert die gleichzeitige Bewertung von vier Hauptlastparametern, da das Drehkranzlager während seiner gesamten Lebensdauer alle aufgebrachten Lasten gleichzeitig tragen muss.
| Parameter laden | Definition | Primäre tragende Komponente | Typische Einheit |
|---|---|---|---|
| Axiale Belastung | Kraft parallel zur Rotationsachse (vertikal im horizontalen Antrieb) | Drehkranz-Wälzkörper | kN |
| Radiale Belastung | Kraft senkrecht zur Rotationsachse (horizontal) | Drehkranz-Wälzkörper | kN |
| Umkippmoment | Biegemoment aus exzentrischer Last oder Seitenkraft | Drehkranzlagerpaar | kN·m |
| Ausgangsdrehmoment | An die Last abgegebenes rotierendes Antriebsmoment | Schneckenrad und Zahnkranz greifen ineinander | N·m |
Ein entscheidender Aspekt bei der Auswahl eines Schwenkantriebs besteht darin, dass diese vier Parameter zusammenwirken: Ein Antrieb, der in der Nähe seines Nenndrehmoments betrieben wird, hat eine verringerte verfügbare axiale und radiale Tragfähigkeit und umgekehrt. In den Bewertungstabellen der Hersteller sind kombinierte Tragfähigkeitshüllkurven angegeben. Bei der richtigen Auswahl muss die tatsächlich angewendete Lastkombination gegen diese Hüllkurven aufgetragen werden, anstatt einzelne Parameter isoliert zu vergleichen.
Schmiersystem und Wartungsanforderungen
Die langfristige Leistung eines horizontalen Schwenkantriebs wird direkt von der Qualität und Konsistenz seines Schmierprogramms bestimmt. Es müssen zwei separate Schmierkreisläufe aufrechterhalten werden: der Drehkranz-Wälzkörperkreislauf und der Schneckenrad-Eingriffskreislauf, die sich bei den meisten Konstruktionen ein gemeinsames Ölbad im Gehäuse teilen, bei Hochleistungs- oder Extremtemperaturanwendungen jedoch möglicherweise unterschiedliche Schmierstoffqualitäten erfordern.
Der Zahneingriff des Schneckenrades wird typischerweise durch Ölspritzer aus einem am Boden des Gehäuses gehaltenen Behälter bis zu einem Niveau geschmiert, das es dem unteren Teil der Hohlradzähne ermöglicht, während der Drehung in das Öl einzutauchen und Schmiermittel in die Eingriffszone zu befördern. Empfohlene Schmierstoffe sind Getriebeöle mit EP-Zusätzen (Extreme Pressure), die für Schneckengetriebeanwendungen entwickelt wurden, wobei die Viskositätsklassen ISO VG 220 oder VG 460 am häufigsten spezifiziert werden. Die hohe Gleitgeschwindigkeit im Kontakt zwischen Schnecke und Rad erzeugt Wärme, die durch die Viskositäts-Temperatur-Eigenschaften des Schmiermittels und die Ölwechselintervalle bewältigt werden muss 2.000 bis 4.000 Betriebsstunden sind typisch für Fahrten im Außeneinsatz.
Die Wälzkörper des Drehkranzes benötigen eine Fettschmierung, die über Schmiernippel am Ring oder Gehäuse erfolgt. Das Fett muss durch in die Laufringe eingearbeitete Fettverteilungsnuten in die Laufbahn der Wälzkörper eindringen. Bei Installationen im Freien sollten die Nachschmierintervalle an den Wartungsplan der Anwendung angepasst werden – typischerweise alle 6 bis 12 Monate bei Solartracker-Anwendungen und häufiger bei Baumaschinen, die Wasch- und Verschmutzungszyklen ausgesetzt sind.
Typische Anwendungen horizontaler Schwenkantriebe
Die Konstruktionsmerkmale horizontaler Schwenkantriebe – kompakte integrierte Bauweise, Selbsthemmungsfähigkeit, hohe Kippmomentkapazität und kontrollierte Drehung bei niedriger Geschwindigkeit – machen sie für einen spezifischen und klar definierten Anwendungsbereich geeignet, bei dem diese Eigenschaften gleichzeitig erforderlich sind.
- Solar-Photovoltaik-Tracker: Einachsige Azimuth-Tracker für Solarparks im Versorgungsmaßstab verwenden horizontale Schwenkantriebe, um Panel-Arrays um eine vertikale Achse zu drehen und dabei der Azimutbewegung der Sonne im Laufe des Tages zu folgen. Die selbsthemmende Eigenschaft hält die Paneelposition auch bei Windlast ohne kontinuierliche Motorleistung präzise und reduziert so den Energieverbrauch und die Komplexität des Steuerungssystems erheblich.
- Mobilkrane und Teleskoplader: Die obere Schwenkstruktur von Mobilkranen dreht sich auf horizontalen Schwenkantrieben, die das volle Kippmoment des Auslegers und der angehobenen Last aufnehmen und gleichzeitig für eine gleichmäßige, kontrollierte Drehung während des Schwenkvorgangs sorgen müssen. Bei dieser Anwendung sind eine hohe Kippmomentkapazität und eine selbsthemmende Lasthaltung von entscheidender Bedeutung.
- Hubarbeitsbühnen (AWPs) und Arbeitsbühnen: Der Drehtisch an der Basis der Auslegerbaugruppe dreht sich auf einem horizontalen Schwenkantrieb und trägt das volle Gewicht des ausgefahrenen Auslegers, der Plattform und der Insassen als Kippmoment. Ein kompakter Bauraum innerhalb der Maschinengrundstruktur ist eine Schlüsselanforderung, die integrierte Schwenkantriebe effizient erfüllen.
- Industrielle Positionierer und Schweißdrehtische: Hoderizontal-Schwenkantriebe rotate workpieces around a vertical axis for welding, inspection, or assembly operations, providing precise angular positioning under substantial workpiece weight. The combination of high axial load capacity and accurate positioning from the worm gear mesh makes them well-matched to this application class.
- Satellitenkommunikationsantennen: Bodengestützte Trackingantennen verwenden horizontale Schwenkantriebe für die Azimutdrehung, wobei eine genaue, spielminimierte Positionierung erforderlich ist, um die Ausrichtung des Antennenstrahls auf sich bewegende Satelliten aufrechtzuerhalten. In diesen Anwendungen werden präzisionsgeschliffene Schneckenprofile und vorgespannte Schneckenwellenlager spezifiziert, um Winkelpositionierungsfehler zu minimieren.

Jiangsu Manchen Transmission Technology Co., Ltd., Excels bei der Schaffung von maßgeschneiderten, zuverlässigen und präzisen Schlägerlagern für verschiedene Branchen, die kontinuierlich innovativ sind, um die höchsten Standards zu erfüllen und kollaborative Möglichkeiten zu suchen. Zuverlässiger und gleichmäßiger Schlägerlager in China.
Produktlinks
Kontaktieren Sie uns
-
Address:Nr. 8, Nanqiu Road, Stadt Huangtu, Stadt Jiangyin , China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingBearingcn.com
