
Nachricht
 Heim / Nachricht / Branchennachrichten / Wie wählen Sie den richtigen Horizontalschwenkantrieb für Ihre Anwendung aus?
Heim / Nachricht / Branchennachrichten / Wie wählen Sie den richtigen Horizontalschwenkantrieb für Ihre Anwendung aus? Wie wählen Sie den richtigen Horizontalschwenkantrieb für Ihre Anwendung aus?
 2026.05.13
2026.05.13
 Branchennachrichten
Branchennachrichten
Die Auswahl des richtigen horizontalen Schwenkantriebs ist eine dieser Entscheidungen, die auf den ersten Blick einfach erscheint, sich jedoch schnell zu komplexer Komplexität entwickelt, wenn man sich mit den Anwendungsanforderungen befasst. Eine schlechte Auswahl führt nicht nur zu schlechter Leistung – sie fällt vorzeitig aus, verursacht Wartungsaufwand und kann in sicherheitskritischen Systemen zu kostspieligen Ausfallzeiten oder Unfällen führen. Dieser Leitfaden geht durch alle wichtigen Auswahlvariablen und bietet Ingenieuren und Beschaffungsspezialisten einen praktischen Rahmen, um gleich beim ersten Mal die richtige Entscheidung zu treffen.
Was ein Horizontalschwenkantrieb eigentlich leistet
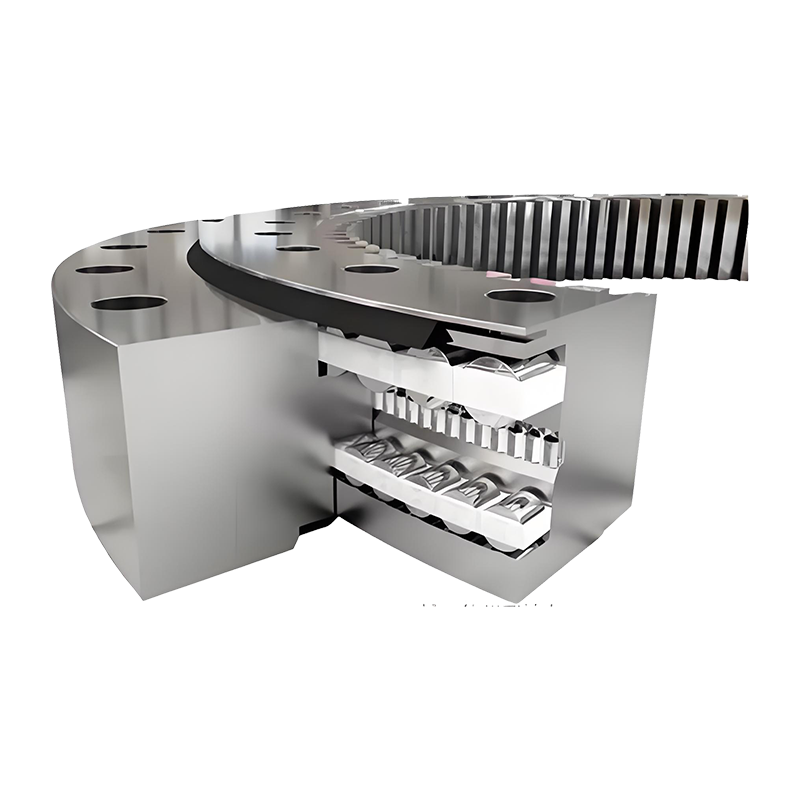
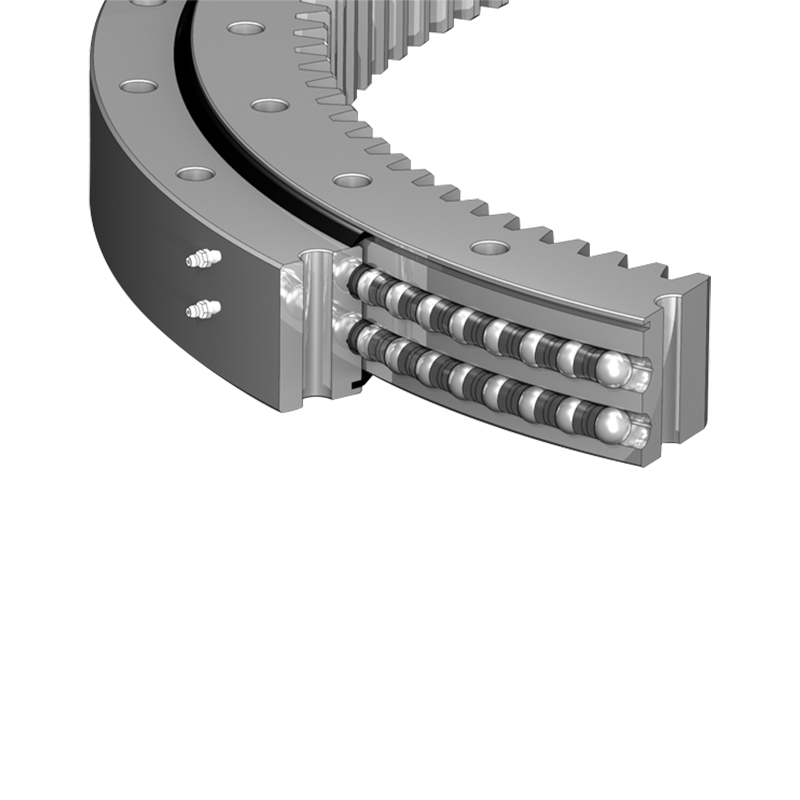
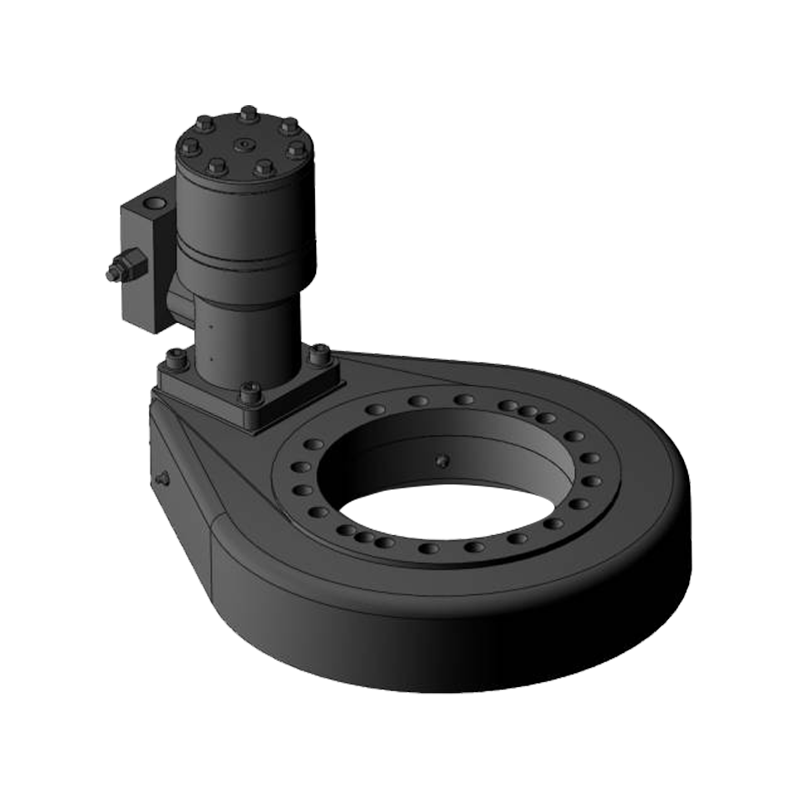
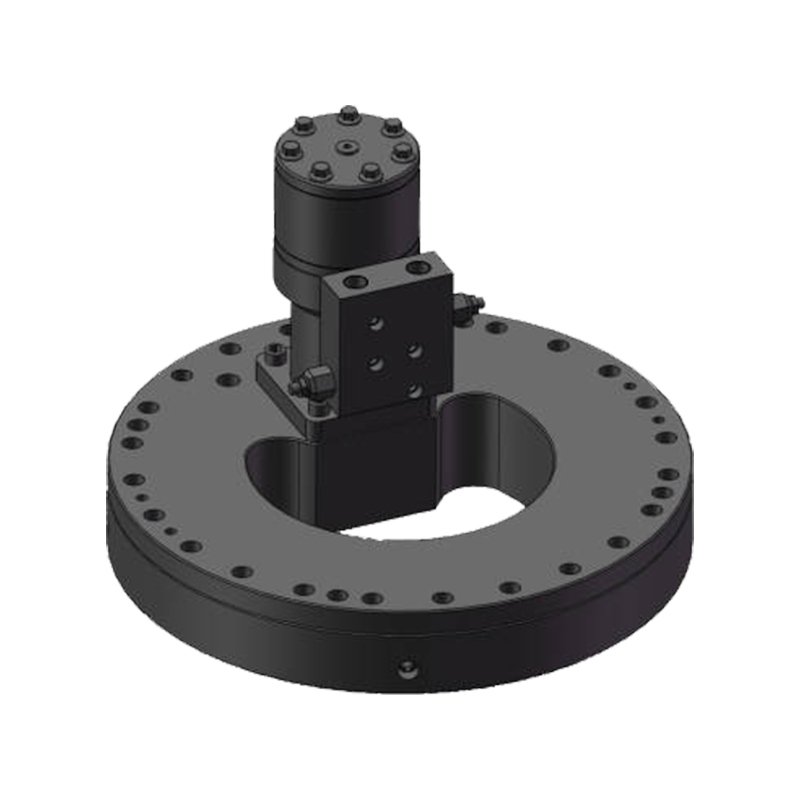
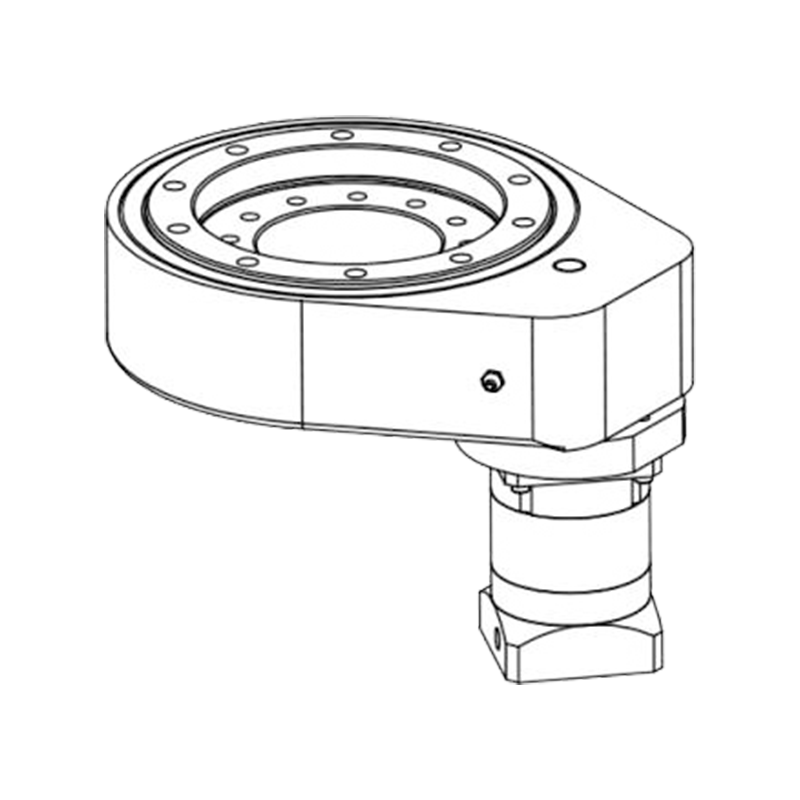
Ein horizontaler Schwenkantrieb ist ein vollständig geschlossener Drehantrieb, der einen Schneckengetriebe-Untersetzungsmechanismus mit einem Drehkranzlager in einem einzigen integrierten Gehäuse kombiniert. Der Drehkranz bewältigt die radialen, axialen und Momentlasten, die von der darüber liegenden rotierenden Struktur ausgeübt werden, während das Schneckengetriebe den mechanischen Vorteil bietet, der erforderlich ist, um diese Rotation mit einer relativ kleinen Motorleistung anzutreiben. „Horizontal“ bezieht sich auf die Ausrichtung der Ausgangsachse des Antriebs – die Drehung erfolgt um eine vertikale Achse und ist daher die natürliche Wahl für Anwendungen, bei denen eine Struktur in der horizontalen Ebene schwingen, schwenken oder kontinuierlich rotieren muss.
Im Gegensatz zu eigenständigen Drehkränzen in Kombination mit externen Getrieben vereinfacht ein integrierter horizontaler Drehantrieb die Installation, verbessert die Dichtungsintegrität und reduziert den technischen Aufwand für die Gestaltung der umgebenden Struktur. Diese Integration ist genau der Grund, warum sie Anwendungen wie Solartracker, Krandrehtische, Hubarbeitsbühnen, Windturbinen-Giersysteme und Satellitenantennenpositionierer dominieren – überall dort, wo kompakte, eigenständige Drehantriebe mit hoher Tragfähigkeit erforderlich sind.
Lastanalyse: Der nicht verhandelbare Ausgangspunkt
Jede Auswahl eines Horizontalschwenkantriebs beginnt mit einer vollständigen Lastanalyse. Das Überspringen oder Annähern dieses Schritts ist die häufigste Ursache für vorzeitiges Versagen. Es gibt drei Lastkategorien, die das Laufwerk gleichzeitig bewältigen muss, und alle drei müssen quantifiziert werden, bevor mit einem Katalogvergleich begonnen wird.
Axiale Belastung
Die Axiallast wirkt parallel zur Abtriebsachse des Antriebs – bei einem horizontalen Schwenkantrieb ist dies typischerweise das Eigengewicht der darüber liegenden rotierenden Struktur. Ein Solarpanel-Array, ein Kran-Drehtisch-Aufbau oder eine Antennenbaugruppe üben ihr Gewicht durch den Antrieb nach unten aus. Dies ist die am einfachsten zu berechnende Last: Sie ist im Wesentlichen die Gesamtmasse aller über dem Antrieb rotierenden Elemente, multipliziert mit der Erdbeschleunigung und ausgedrückt in Kilonewton.
Radiale Belastung
Die Radiallast wirkt senkrecht zur Abtriebsachse – bei einem horizontalen Schwenkantrieb horizontal. Der Winddruck auf ein großes Panel oder eine große Antenne ist die häufigste Quelle radialer Belastung bei Außenanwendungen. Eine exzentrische Belastung, die durch einen außermittigen Schwerpunkt in der rotierenden Baugruppe verursacht wird, trägt ebenfalls zu einer radialen Komponente bei. Radiallasten sind oft dynamisch und richtungsvariabel, weshalb die Schätzung des Spitzenwerts wichtiger ist als die Berechnung des Durchschnittswerts.
Umkippmoment
Das Kippmoment ist die Biegelast, die versucht, die rotierende Struktur relativ zum Antriebsgehäuse zu neigen. Es wird immer dann erzeugt, wenn der Schwerpunkt der rotierenden Baugruppe nicht direkt über der Drehmittellinie des Antriebs liegt oder wenn horizontale Kräfte (z. B. Wind) in einer Höhe über der Montageebene des Antriebs wirken. Das Kippmoment wird in Kilonewtonmetern ausgedrückt und ist häufig der anspruchsvollste Lastparameter – viele Antriebe, die axiale und radiale Belastungsprüfungen bestehen, versagen aufgrund der Kippmomentkapazität.
Drehmomentanforderungen und Motordimensionierung
Sobald die Belastungen ermittelt sind, muss das erforderliche Ausgangsdrehmoment berechnet werden. Dies ist das Drehmoment, das am Abtriebsring des Antriebs benötigt wird, um alle Widerstandskräfte zu überwinden und die Last innerhalb einer akzeptablen Zeit auf die erforderliche Drehzahl zu beschleunigen. Die Hauptfaktoren für das erforderliche Drehmoment sind die Reibung innerhalb des Drehkranzlagers (die mit der Axiallast und dem Kippmoment zunimmt), der Luftwiderstand an der rotierenden Struktur und das während der Beschleunigungsphasen erforderliche Trägheitsdrehmoment.
Horizontal-Schwenkantriebe werden durch ihr Nennhaltemoment und Nennarbeitsdrehmoment angegeben – diese Werte stimmen nicht überein. Das Haltemoment ist die maximale statische Belastung, die der Antrieb ohne Drehung aushalten kann. Das Arbeitsdrehmoment ist das während des Betriebs verfügbare Dauerdrehmoment. Die Selbsthemmungseigenschaft des Schneckengetriebes (vorhanden, wenn der Steigungswinkel unter dem Reibungswinkel liegt, typischerweise wenn das Übersetzungsverhältnis etwa 20:1 übersteigt) bedeutet, dass viele horizontale Schwenkantriebe ihre Position unter Last ohne separate Bremse halten können – eine Funktion, die das Systemdesign in Anwendungen wie Solartrackern vereinfacht, bei denen der Antrieb einen Panelwinkel gegen Windlast halten muss, ohne dass der Motor kontinuierlich mit Energie versorgt wird.
Die Motorauswahl ergibt sich aus dem erforderlichen Eingangsdrehmoment (Ausgangsdrehmoment dividiert durch das Übersetzungsverhältnis, angepasst an den Antriebswirkungsgrad) und der erforderlichen Eingangsdrehzahl (Ausgangsdrehzahl multipliziert mit dem Übersetzungsverhältnis). Die meisten horizontalen Schwenkantriebe akzeptieren Standard-IEC- oder NEMA-Rahmenmotoren und viele werden motorfertig mit einem bearbeiteten Motormontageflansch geliefert.
Wichtige Auswahlparameter im Vergleich
| Parameter | Was zu bestimmen ist | Gemeinsamer Bereich | Auswahlrisiko bei Unterspezifizierung |
| Axiale Belastung Capacity | Gesamte rotierende Masse × Schwerkraft | 5 kN – 2.000 kN | Verformung des Lagerrings, Fresser |
| Umkippmoment | Exzentrische Last × Momentarm | 0,5 kNm – 500 kNm | Zahnkranzausfall, Verkanten |
| Arbeitsdrehmoment | Reibungswiderstandsträgheitsmoment | 0,5 kNm – 200 kNm | Motorüberlastung, Schneckenradverschleiß |
| Ausgabegeschwindigkeit | Erforderliche Anstiegsgeschwindigkeit (°/min oder U/min) | 0,01 – 10 U/min | Positionierungsfehler, thermische Überschreitung |
| Übersetzungsverhältnis | Selbsthemmungsbedarf vs. Effizienz | 20:1 – 100:1 | Rückwärtsfahren, Bremsanforderung |
Überlegungen zu Umwelt und Arbeitszyklus
Ein Laufwerk, das die mechanischen Belastungsanforderungen auf dem Papier erfüllt, kann dennoch frühzeitig ausfallen, wenn die Umgebungsspezifikation falsch ist. Horizontal-Schwenkantriebe werden häufig im Freien eingesetzt, oft unter rauen Bedingungen, und Gehäuse, Abdichtung und Oberflächenbehandlung müssen auf die Betriebsumgebung abgestimmt sein.
- IP-Bewertung: Für Außenanwendungen ist grundsätzlich mindestens IP65 erforderlich, um Staub und Strahlwasser auszuschließen. Meeres- oder Küstenumgebungen erfordern IP67 oder höher, mit Edelstahlbefestigungen und zusätzlichem Korrosionsschutz auf exponierten Oberflächen. Bestätigen Sie, dass die IP-Schutzart für den vollständig zusammengebauten Antrieb einschließlich der Motorschnittstelle gilt – einige Antriebe sind am Gehäuse nach IP65 eingestuft, verfügen jedoch über ungeschützte Motormontageflächen, die zu Eintrittspunkten werden.
- Temperaturbereich: Standardschmierstoffe funktionieren gut zwischen –20 °C und 80 °C. Anwendungen in arktischen Umgebungen, Wüstenanlagen oder in der Nähe industrieller Wärmequellen erfordern spezielle Niedertemperatur- oder Hochtemperaturfette. Bestätigen Sie die Schmierstoffspezifikation des Antriebsherstellers und den abgedeckten Temperaturbereich, bevor Sie die Auswahl für den Einsatz in extremen Klimazonen abschließen.
- Arbeitszyklus: Horizontal-Schwenkantriebe in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Korrosionsschutz: Standardantriebe verwenden zinkphosphatgrundierte und lackierte Stahlgehäuse, die für Binnenumgebungen geeignet sind. Küsten- und Offshore-Installationen erfordern je nach Korrosivitätskategorie des Standorts feuerverzinkte Gehäuse, Ausgangsringe aus Edelstahl oder epoxidbeschichtete Oberflächen.
Montagekonfiguration und Schnittstellengeometrie
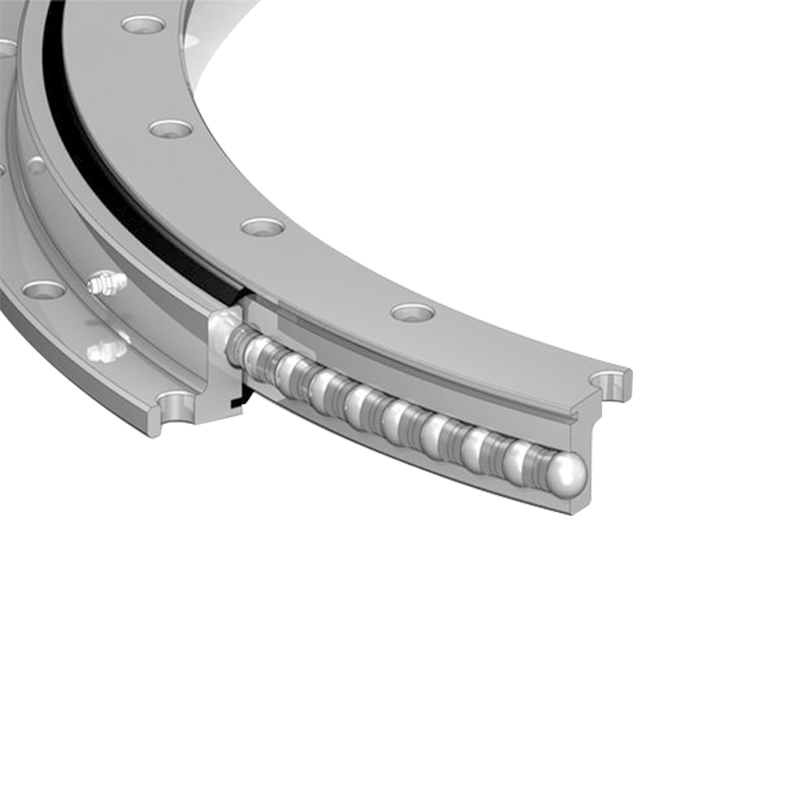
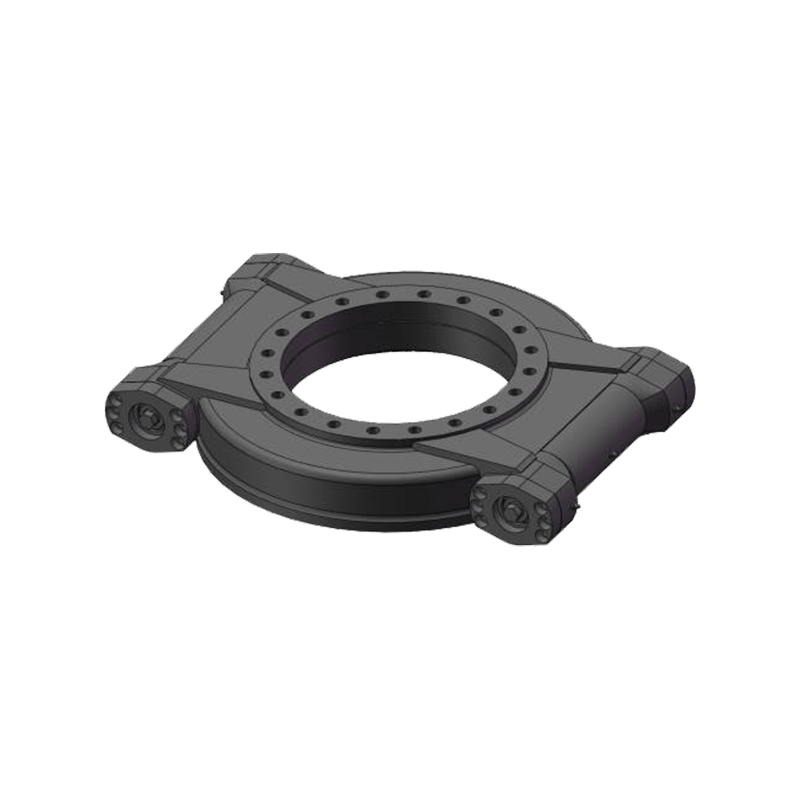
Die physische Integration des Schwenkantriebs in die umgebende Struktur ist eine praktische Einschränkung, die bei der Auswahl und nicht bei der Installation gelöst werden muss. Horizontal-Schwenkantriebe sind mit unterschiedlichen Abtriebsringkonfigurationen erhältlich – Außenzahnrad (Zähne an der Außenseite des Abtriebsrings), Innenzahnrad (Zähne an der Innenseite) und zahnlos (reibungsgetrieben oder direkte Verbindung) – jeweils geeignet für unterschiedliche kinematische Anordnungen. Abtriebsringe mit Außenverzahnung sind am gebräuchlichsten und ermöglichen die Positionierung der Schneckenwelle außerhalb des Ringdurchmessers, sodass Motor und Getriebe für Wartungsarbeiten zugänglich bleiben. Innenverzahnte Konfigurationen werden verwendet, wenn der Antrieb in eine kompakte rotierende Baugruppe integriert werden muss.
Die Lochkreisabmessungen sowohl am festen Gehäuse als auch am rotierenden Abtriebsring müssen anhand der Gegenstruktur überprüft werden. Viele Hersteller bieten kundenspezifische Schraubenmuster, Montageflansche und Abtriebswellenschnittstellen als Standardoptionen an – die Angabe dieser bei der Bestellung ist weitaus kostengünstiger als die Bearbeitung von Adaptern vor Ort. Überprüfen Sie auch den Durchgangslochdurchmesser, wenn Kabel, Hydraulikleitungen oder Pneumatikschläuche durch die Mitte des Antriebs verlaufen müssen – nicht alle horizontalen Schwenkantriebe verfügen über eine Mittenbohrung, und eine Nachrüstung dieser Funktion ist nicht möglich.

Sicherheitsfaktoren und Lebensdauererwartungen
Veröffentlichte Belastungswerte für horizontale Schwenkantriebe basieren in der Regel auf Berechnungen der statischen Prüflast oder der dynamischen Ermüdungslebensdauer. Die Anwendung eines geeigneten Sicherheitsfaktors oberhalb der berechneten Betriebslast ist gängige technische Praxis. Für die meisten nicht sicherheitskritischen Anwendungen ist ein Sicherheitsfaktor von 1,5× bis 2× für Arbeitsdrehmoment und Tragfähigkeit angemessen. Für Anwendungen, bei denen ein Antriebsausfall eine Gefahr für das Personal darstellt – Hubarbeitsbühnen, medizinische Positionierungsgeräte oder auf Fahrzeugen montierte Kräne – können Sicherheitsfaktoren von 3x oder höher angegeben werden, und die Zertifizierung durch Dritte nach relevanten Maschinensicherheitsstandards (z. B. EN 13000 für Kräne oder ISO 11684 für landwirtschaftliche Geräte) sollte vom Antriebshersteller bestätigt werden.
Die erwartete Lebensdauer sollte im Hinblick auf die Lebensdauer des L10-Lagers (die Anzahl der Betriebsstunden, bei der 10 % einer Population identischer Antriebe voraussichtlich einen Lagerermüdungsausfall aufweisen würden) und die Lebensdauer der Schneckenradoberfläche durch Ermüdung erörtert werden. Für Solar-Tracking-Anwendungen ist eine Lebensdauer von 25 Jahren die Branchennorm; Bestätigen Sie, dass die L10-Lebensdauerberechnung des Herstellers auf dem tatsächlichen Betriebslastprofil der Anwendung und nicht auf einer allgemeinen Referenzbedingung basiert.
Praktische Checkliste, bevor Sie Ihre Auswahl abschließen
- Bestätigen Sie die Axiallast, die maximale Radiallast und das maximale Kippmoment unter ungünstigsten Bedingungen (normalerweise maximale Windgeschwindigkeit kombiniert mit maximaler exzentrischer Last).
- Stellen Sie sicher, dass das Nennarbeitsdrehmoment des ausgewählten Antriebs das berechnete erforderliche Ausgangsdrehmoment um den gewählten Sicherheitsfaktor übersteigt
- Überprüfen Sie das Übersetzungsverhältnis auf Selbsthemmung, wenn eine passive Positionshaltung erforderlich ist, oder bestätigen Sie die Bremsspezifikation, wenn dies nicht der Fall ist
- Stellen Sie sicher, dass IP-Schutzart, Temperaturbereich und Korrosionsschutz mit der Installationsumgebung übereinstimmen
- Überprüfen Sie die Abmessungen des Lochkreises, die Konfiguration des Abtriebsrings und die Anforderungen an die Mittelbohrung anhand des entsprechenden Strukturdesigns
- Fordern Sie eine Berechnung der L10-Lagerlebensdauer auf der Grundlage des tatsächlichen Anwendungslastprofils und nicht der Katalogreferenzbedingungen an
- Bestätigen Sie die Kompatibilität der Motorschnittstelle – Baugröße, Wellendurchmesser und Montageflanschstandard (IEC oder NEMA).
- Überprüfen Sie die Schmierspezifikation und das Nachschmierintervall anhand des geplanten Wartungsplans
Die Auswahl eines horizontalen Drehantriebs belohnt eine methodische Analyse. Bei den Laufwerken selbst handelt es sich um robuste, bewährte Komponenten – Ausfälle, die im Feld auftreten, sind fast immer auf einen unterspezifizierten Lastparameter, eine nicht übereinstimmende Umgebungsbewertung oder eine übersehene Schnittstellenbeschränkung zurückzuführen. Gehen Sie jede der oben genannten Variablen systematisch durch und wenden Sie sich an die technische Unterstützung des Herstellers, wenn die Anwendungsbedingungen ungewöhnlich sind. Das Ergebnis ist ein Antrieb, der über die gesamte vorgesehene Lebensdauer des Systems, das er antreibt, zuverlässig funktioniert.

Jiangsu Manchen Transmission Technology Co., Ltd., Excels bei der Schaffung von maßgeschneiderten, zuverlässigen und präzisen Schlägerlagern für verschiedene Branchen, die kontinuierlich innovativ sind, um die höchsten Standards zu erfüllen und kollaborative Möglichkeiten zu suchen. Zuverlässiger und gleichmäßiger Schlägerlager in China.
Produktlinks
Kontaktieren Sie uns
-
Address:Nr. 8, Nanqiu Road, Stadt Huangtu, Stadt Jiangyin , China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingBearingcn.com
